

無人機導航或將不再依賴GNSS
美國德雷珀實驗室與麻省理工學院研究團隊為無人機研發了一種先進的視覺輔助導航技術。該技術不依賴全球導航衛星系統(GNSS)、環境地圖以及動作捕捉系統等外部設備或設施。
背景
根據美國防高級研究計劃局(DARPA)授予的“快速輕型自主性”(FLA)合同,德雷珀和麻省理工學院建造了一種無人機,不需要外部通信設施或GNSS就能在未知的環境中自主感知和機動。該團隊研發并采取了獨特的傳感器和算法配置,并在室內外開展了計時測試和性能評估。
當消防員、急救人員或士兵在建筑物內、城市峽谷、地下或森林中操作小型輕型飛行器時,GNSS拒止的環境會產生獨特的導航挑戰。在許多情況下,GNSS信號的丟失可能導致這些無人機變得無法操作或運行不穩定,還有可能使操作人員、旁觀者以及他人財產置于危險之中。
雖然已經進行了一些嘗試,尋求無人機在沒有GNSS的情況下也能夠導航的替代方法,但是很多嘗試都導致信息不足,特別是對于飛行速度超越了機載技術能力的無人機而言更是如此。例如,當無人機在缺少建筑物、樹木和其他參照物的環境中飛行時,掃描激光雷達(LiDAR)通常無法實現精確的位置匹配。
德雷珀實驗室高級技術人員羅伯特·杜亞士表示,對無人機而言,最大的挑戰是平衡動力、飛行時間及其能力。

不依賴GNSS的新型無人機
研究團隊已經找到一個最佳的小尺寸、重量和功率的平衡點,同時具備有效的機載計算能力可完全自主地執行復雜的任務。在研發新型無人機時,該團隊發揮了德雷珀實驗室和麻省理工學院在自主路徑規劃、機器視覺、GNSS拒止導航和動態飛行控制方面的專長。
德雷珀和麻省理工研制的裝載傳感器和攝像機的無人機已經在許多環境中進行了試驗,包括雜亂的倉庫和同時存在開闊地及茂密林木的環境。無人機在雜亂區域的速度可達10米/秒,開闊區域為20米/秒。無人機的任務包括:躲避樹木、找到建筑物入口以及保持精確的位置估計。
德雷珀高級技術人員泰德·斯坦納表示,研究團隊研發的傳感與算法配置、配有慣性測量單元(IMU)為中心的單目攝像機,使無人機具有靈活機動能力,提高了可靠性和安全性。

在2017年美國電子電氣工程師協會(IEEE)舉辦的航空航天會議上,一篇論文中記錄了德雷珀實驗室對DARPA FLA項目的貢獻。研究人員研究了一種名為“利用慣性狀態估計的平滑與映射”(SAMWISE)的狀態估計(無人機位置、方向和速度)新方法。它是一種融合的視覺和慣性導航系統,結合了兩種傳感方式的優點,不過隨時間累積的誤差比任何技術都要慢,能對無人機的飛行軌跡生成完整的位置、姿態和速度狀態估計。德雷珀實驗室稱,最終成果是獲得一種導航解決方案,使無人機能夠保持六自由度飛行,允許其在不依靠GNSS的情況下自主飛行,或與速度高達每小時45英里的無人機進行通信。
其他潛在應用
研究團隊對FLA項目的關注重點一直是無人機,但通過該項目取得的技術進步可能應用于地面、海洋和水下系統。這在GNSS降級或拒絕環境中尤其有用。
更多相關

三維激光掃描儀在林業調查中的應用
三維激光掃描技術憑借其高效、精準、非接觸式的數據采集能力,在林業調查中發揮著重要作用。林業調查是森林資源管理的基礎工作,傳統方法依賴人工測量,效率...

地鐵的安全運行,由中緯ZDL700來守護
應用背景隨著城市軌道交通和地鐵隧道的大規模建設,施工過程中的現場監測己經成為地下工程建設中不可或缺的部分。在地鐵隧道的盾構施工中,需要密切關注施工中地表沉降、周邊構筑物基礎位移等現象。在這個過程中...

千尋與中海達聯名款RTK:高精度定位領域的革新之作
千尋位置與中海達聯名款RTK啟航TU7:高精度定位領域的革新之作在測繪、農業、工程等領域,高精度定位技術正逐漸成為不可或缺的工具。隨著北斗系統的全面部署和定位技術的不斷進步,市場對高精度定位設備的需求...

中緯ZOOM95全站儀優勢介紹
中緯ZOOM95全站儀憑借其先進的技術和多項創新功能,在眾多全站儀中脫穎而出。以下是中緯ZOOM95全站儀的一些主要優勢:1.自動化程度高-自動瞄準:采用先進的AIM360技術,能夠自動照射目標棱...
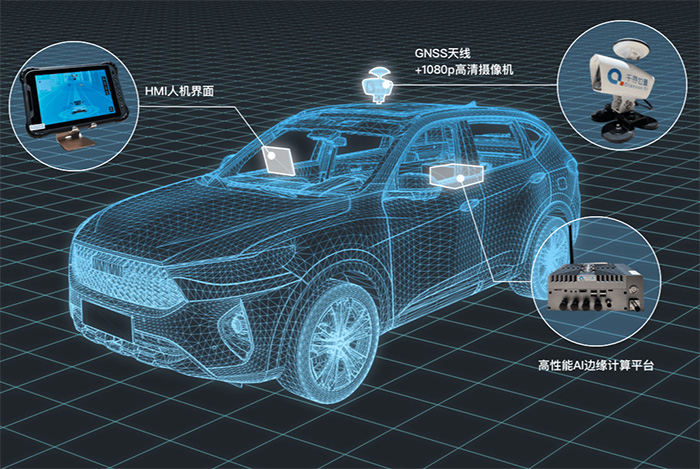
千尋馳觀道路智能巡檢系統
千尋馳觀道路智能巡檢系統:數字化賦能交通基礎設施智慧化管理一、系統概述千尋馳觀道路智能巡檢系統是由千尋位置網絡有限公司(以下簡稱“千尋位置”)推出的一款基于高精度定位、人工智能(AI)及云計算技術的道...

全站儀在建筑行業中的測繪應用
現代化的城市在呈現飛躍式的發展,其中的房地產事業是代表城市繁榮昌盛的建筑群體之一。城市要發展,房地產事業就得跟上,在如此快速迅猛發展的壓力下,質量的把關和進度的控制成為建筑行業發展的最終目標。本文...

CSV格式坐標數據怎么導入H5手簿?2個技巧就可以了
技巧一 新建一個Excel表格。 按照點名、x、y、h的順序依次輸入數據。 輸入完畢后,點擊另存為,選擇格式CSV(逗號分隔)(*.csv)。 保存后,在桌面上找到這個csv文件,選中...
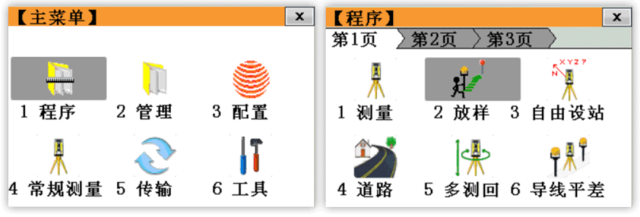
【技術指南】中緯ZT30R Pro全站儀放樣測量
具體操作步驟講解點擊1鍵【程序】—2鍵【放樣】在做好設置作業和設站、定向后,點擊F4【開始】,進入放樣界面。第1、2、3、4頁分別為極坐標法、正交法、笛卡爾法和測量點高程。本次操作以極坐標法為例,有【...
 環球測繪微信
環球測繪微信